





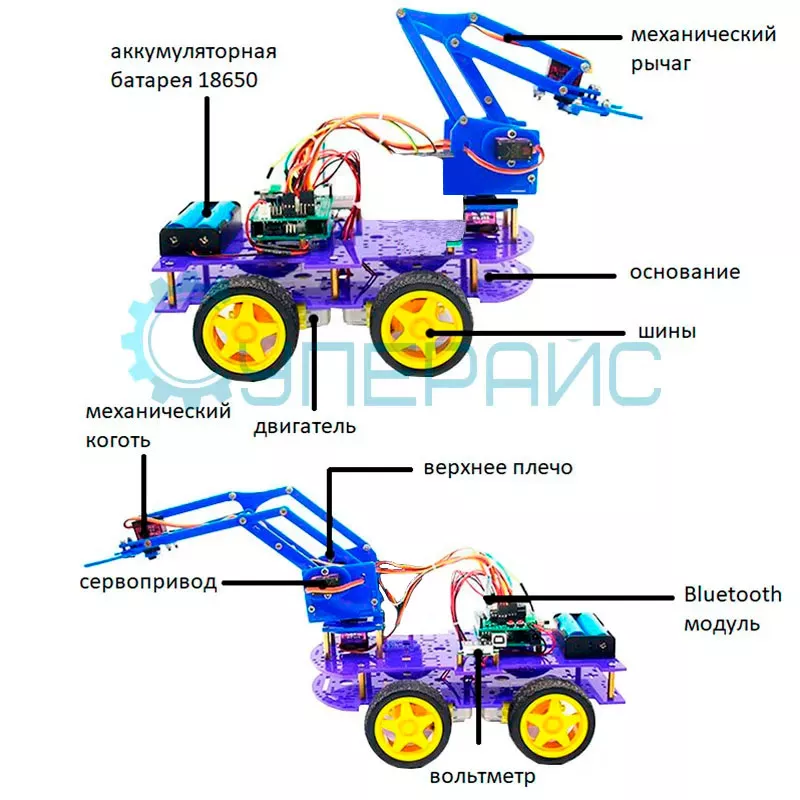



Робот-манипулятор на шасси MeArm с контроллером, совместимым со средой Arduino
Технические характеристики манипулятора на шасси MeArm
| Управление | управление автомобилем через среду программирования Arduino, посредством Bluetooth |
| Программирование | среда разработки Arduino IDE |
| Управление двигателем | драйвер моторов L293D |
| Передаточное число двигателя | 1:48 |
| Стабилизатор напряжения | 7805 |
| Степень свободы (DOF) | 4 |
| Функциональные возможности | возможность перемещения, захват и перемещение различных небольших предметов |
| Характеристики контроллера UNO R3 | |
| Микроконтроллер | ATmega328 |
| Рабочее напряжение | 5 В |
| Входное напряжение (рекомендуемое) | 7-12 В |
| Входное напряжение (предельное) | 6-20 В |
| Цифровые входы/выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | 6 |
| Постоянный ток через вход/выход | 40 мА |
| Постоянный ток для вывода 3.3 В | 50 мА |
| Флеш-память | 32 Кб (ATmega328) из которых 0.5 Кб используются для загрузчика |
| ОЗУ | 2 Кб (ATmega328) |
| EEPROM | 1 Кб (ATmega328) |
| Тактовая частота | 16 МГц |
| Характеристики сервопривода SG90 | |
| Напряжение питания | 3.5 - 6 В |
| Скорость без нагрузки | 0.12 с/60° (4.8 В), 0.10 с/60° (6 В) |
| Вращающий момент при заторможенном роторе | 1.5 кг/см (4.8 В) 1.7 кг/см (6 В) |
| Рабочая "мертвая зона" | 5 мкс |
| Рабочая температура | - 30 ∼ + 60°С |
| Вес | 9 г |
| Характеристики Bluetooth модуля ZS-040 | |
| Входное напряжение | DC 3.6 ~ 6 В |
| Максимальное напряжение | 7 В |
| Потребление тока | около 50 мА |
| Дальность действия | до 10 м |
| Стандарт | Bluetooth 2.0 + EDR |
| Связь | UART (RX, TX) |
| Защита | от обратной полярности |
| Контакты | EN - включение/выключение модуля, VCC - питание +5В, GND - земля, TXD, RXD - UART интерфейс для общения с контроллером, STATE - индикатор состояния, KEY - нога для входа в режим AT-команд |
| Материал | FR4 |
| Диапазон рабочих температур | -20 +70 °С |
| Габариты | 37 х 15 х 3 мм |
| Общие характеристики | |
| Питание | две литий-ионных батареи 3.7 В |
| Время работы от заряженного аккумулятора | ∼ 30 мин |
| Габариты | 250 x 250 x 150 мм |
| Вес | 1,3 кг |
| Комплектация: | |
| плата UNO R3 (Arduino-совместимый контроллер) – 1 шт | |
| USB кабель – 1 шт | |
| сервопривод Tower Pro MG90S – 4 шт | |
| motor shield – 1 шт | |
| платформа машинки – 1 шт | |
| крепежный набор – 1 шт | |
| соединительные провода 3P (папа-мама) 20 см – 1 шт | |
| адаптер для батареек – 1 шт | |
| крепеж мотора – 8 шт | |
| набор деталей из акрила для сборки механического манипулятора – 1 шт | |
| колесо – 4 шт | |
| мотор – 4 шт | |
| вольтметр – 1 шт | |
| литий-ионный аккумулятор 18650 – 2 шт | |
| Bluetooth модуль ZS-040 – 1 шт | |
| зарядное устройство – 1 шт | |
| отвертка – 1 шт | |
| хомут – 5 шт | |
Конструктор робот-манипулятор на шасси MeArm
Робот-манипулятор MeArm на шасси с контроллером UNO R3 — это программируемый четырехколесный робот, оснащенный механической рукой и поддержкой Bluetooth, что открывает возможности для дистанционного управления и разработки гибких алгоритмов. Роботизированная рука с высокой точностью захвата позволяет выполнять различные манипуляции, что делает его отличным выбором для промышленного применения и образовательных целей.
Контроллер UNO R3 на базе микроконтроллера ATmega328 предлагают стабильную работу системы, а драйвер моторов L293D дает возможность управлять движением и манипуляциями. Робот-манипулятор может быть использован в качестве роборука для помощи в различных рабочих задачах, где требуется высокая точность и стабильность выполнения.
Робот обладает четырьмя степенями свободы, что позволяет не только перемещаться по различным направлениям, но и захватывать и переносить предметы. Благодаря Bluetooth модулю поддерживается дистанционное управление через мобильное устройство на расстоянии до 10 метров. Встроенные сервоприводы Tower Pro MG90S обеспечивают точное и плавное движение манипулятора. Можно легко интегрировать систему с Arduino, чтобы добавить дополнительные функции или улучшить управление. Это открывает перед пользователями новые возможности для творчества и развития навыков в робототехнике.
Список преимуществ робота-манипулятора MeArm:
- Высокая точность работы механической руки.
- Возможность дистанционного управления через Bluetooth.
- Поддержка программирования с использованием Arduino.
- Идеален для учебных и промышленных целей.
- Простота сборки и гибкость в настройке.
Для профессионалов робот может стать полезным помощником в промышленных задачах, где требуется выполнение повторяющихся действий с высокой точностью и без вмешательства человека.
Питание обеспечивается двумя литий-ионными батареями 3.7 В, что позволяет роботу функционировать автономно до 30 минут. Набор деталей включает необходимые компоненты для сборки: моторы, колёса, USB кабель, плату motor shield, а также вольтметр и зарядное устройство для аккумуляторов. Если вы купили этот комплект, то сможете собрать не только мобильного робота, но и использовать его как основную платформу для дальнейших экспериментов с роботизированными системами.
Мобильный робот манипулятор MeArm — выбор для тех, кто ищет роботизированную платформу с широкими возможностями программирования и дистанционного управления. Этот робот подойдет для создания автономных систем, исследования и развития навыков в области робототехники.
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.

